Kinematic design and Stewart platforms
Posted on February 8, 2024 Instrumentation & Equipment Design

A few months ago, we introduced kinematic design, highlighting a kinematic base for optics mounting.
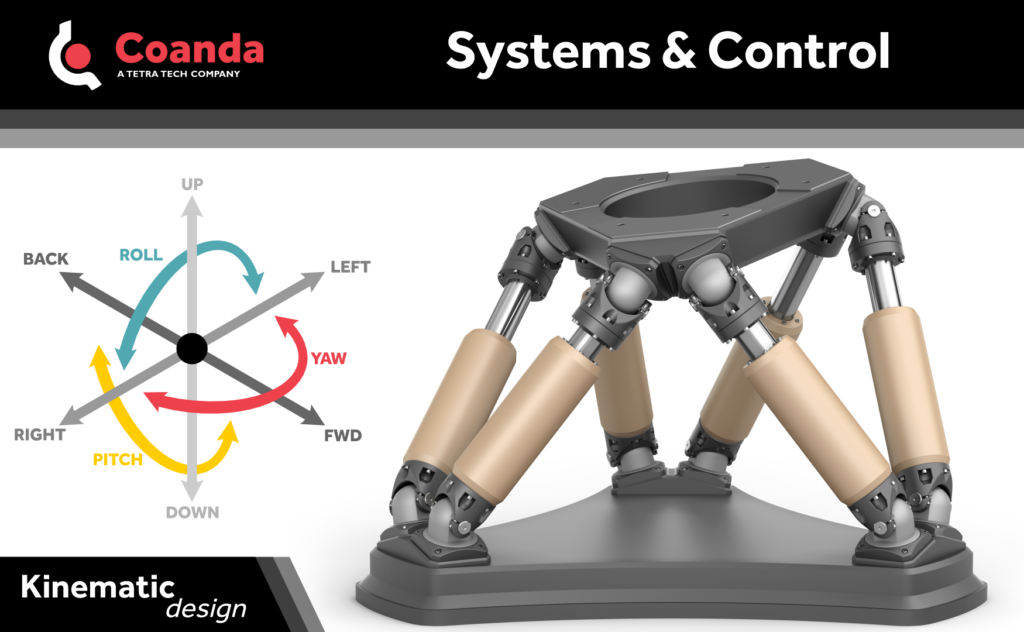
A solid object has six positional degrees of freedom. These degrees of freedom can be parametrized in an infinite number of ways, but are easily conceptualized as three spatial coordinates, (x, y, z), and three angles, (pitch, roll, yaw).
Kinematic design requires that exactly six degrees of freedom are constrained. In our earlier post, we showed how this concept allows the top of the base to be removed and replaced in exactly the same position, with no stresses from bolted connections, such that the optic on top doesn’t need to be realigned.
The Stewart platform (a.k.a. hexapod manipulator) is another implementation of the kinematic design concept. Six linear axes connect the upper platform to the base.
Stewart platforms are implemented over a large range of scales, and for different reasons.
Flight simulators are often built on Stewart platforms, as the allow for faster dynamics. If one were to instead stack up three linear axes and three tilt stages, motion along the bottom axis in the stack would require one actuator to move the weight of the flight deck and five actuator stages. The same motion on a Stewart platform is accomplished by six actuators working together, and the base of each actuator remains in place. The reduction of moving weight allows the simulator to accelerate rapidly with a lower installed cost.
Stewart platforms are often used in precision alignment applications where the stack-up of tolerances from cascaded motion stages aren’t acceptable. They can be implemented in lubricant-free designs, allowing their use in high purity environments like in the semiconductor industry. Applications include alignment of telescope optics, positioning of x-ray diffraction gratings, sample manipulation in ultrahigh vacuum and in synchrotrons. As the platform isn’t over constrained, there’s no risk of distortion of the payload during motion.
In a future post, we’ll look an implementation of Stewart platforms at Coanda.